快速体验
本文介绍如何使用我们开发的vf2_bootloader引导程序代替Uboot,在Visionfive 2平台上运行。
预先准备环境:
- Visionfive2 开发板
- 一台Linux主机或虚拟机(能够读写SD卡)
- riscv工具链(unknow-none)
- Rust语言环境
- Uart USB转TTL(或其他可以连接uart的设备)
VisionFive 2 及启动流程
VisionFive 2是一款搭载RISC-V处理器的单板计算机,它拥有一个采用RV64GC ISA的四核64位SoC,运行速度高达1.5 GHz,提供了丰富的外设。
VisionFive2 的启动流程为 BootROM > SPL + Open SBI + UBoot > Kernel + File System > Boot Complete。其中BootROM为片上内存,spl是Uboot的一部分,OpenSBI编译后同UBoot链接在一起,启动过程如下图所示:
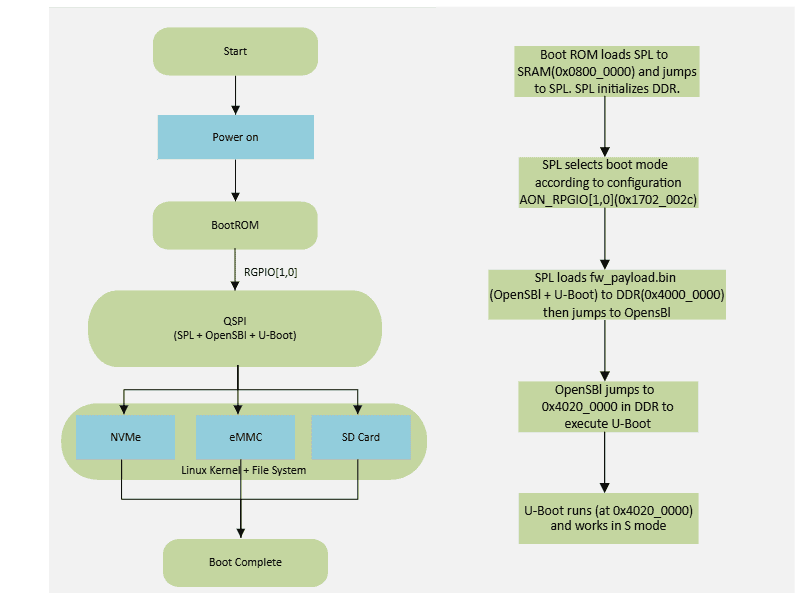
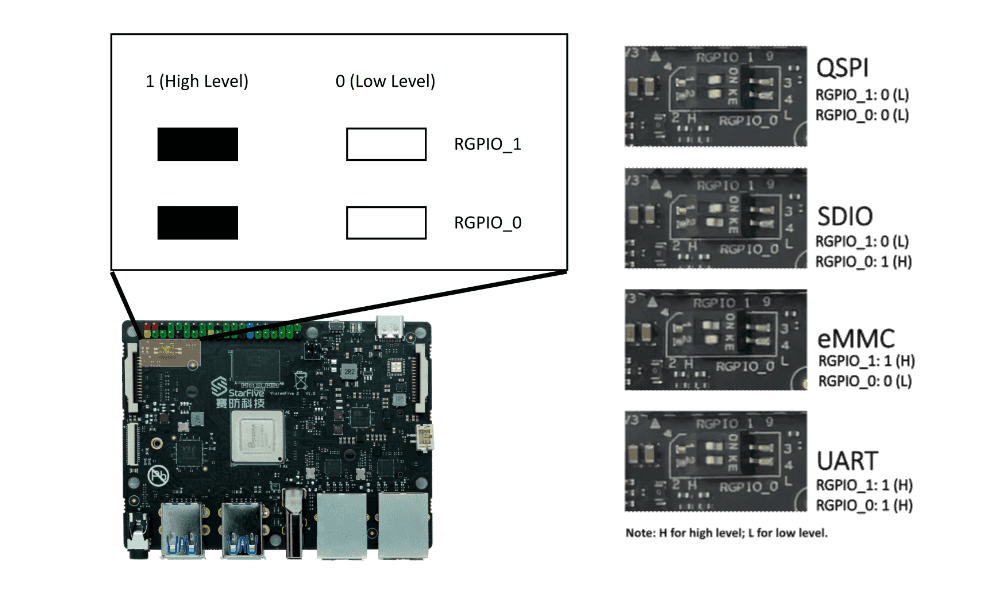
加电后,第一步是执行BootROM,然后需要根据启动模式执行下一步;启动模式如下:
| index | 启动模式 | RGPIO_1 | RGPIO_0 |
|---|---|---|---|
| 1 | 1-bit QSPI Nor Flash | 0 (L) | 0 (L) |
| 2 | SDIO3.0 | 0 (L) | 1 (H) |
| 3 | eMMC | 1 (H) | 0 (L) |
| 4 | UART | 1 (H) | 1 (H) |
第二步是根据选择的启动模式将spl加载至SRAM中执行,spl是Uboot的一部分,它主要的任务是调整一些板子的设置并加载Uboot到主存;第三步:spl加载完Uboot并跳转到Uboot的入口地址执行,Uboot提供了很多命令,可以用来查看一些板子的配置信息、设置环境变量、加载内核到内存…… 最重要的功能就是向内核传递一些参数并将内核加载至内存,最终跳转到内核执行。
如果想加载自定义的操作系统内核,使用Uboot可能不是那么容易,因此我们重写了启动引导第三步的程序,并把它命名为vf2_bootloader,将这个程序刷写到设备中,就可以实现自由灵活的加载自定义的内核了。
在刷写程序之前,有个问题需要先考虑一下:板载BootROM固件根据启动模式选择SPL的加载位置有三种,QSPI Flash、SD、NVME、eMMC(Uart用于恢复SPL和Uboot),spl和Uboot被放置在一个设备的不同分区中,我们需要考虑这三种设备中,哪种设备便于刷入程序,并且最好不要随意刷写焊接在板子上的硬件,因为硬件损坏不易维修。QSPI Flash和eMMC(不自带)被焊接在板子上,出现硬件问题不易解决,而NVME硬盘成本稍高,不宜反复插拔,而SD卡容易插拔、出问题更换的成本低。
所以本实验使用SD卡进行,你需要按照上面的图将启动模式调整为SDIO模式,那么话不多说,我们开始吧!
开始制作自定义的引导程序
本机环境为x86_64架构,Ubuntu 24.04,首先我们来安装一些必要的环境。
1. Rust 语言环境
安装Rust语言环境,可能会由于网络问题比较缓慢,我们可以配置国内镜像解决这个问题,在您的终端中输入:
$ export RUSTUP_DIST_SERVER=https://mirrors.ustc.edu.cn/rust-static
$ export RUSTUP_UPDATE_ROOT=https://mirrors.ustc.edu.cn/rust-static/rustup
你也可以选择将这两个环境变量写入环境变量配置文件,使其永久生效。(比如将这条命令追加到~/.bashrc,然后source ~/.bashrc 使环境变量立即生效)。
接下来,就可以安装Rust语言环境了,执行
curl --proto '=https' --tlsv1.2 -sSf https://sh.rustup.rs | sh
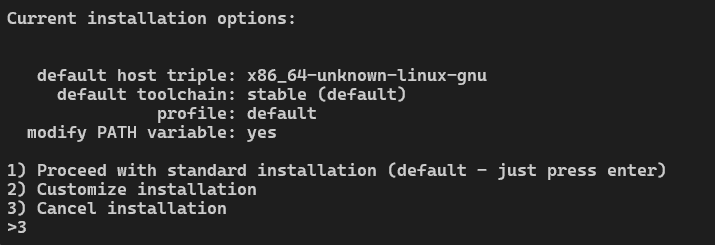
安装程序需要我们确认安装,此时我们直接Enter默认安装即可,等待安装完成。需要执行source ~/.bashrc使环境变量生效,执行rustc --version和cargo --version验证Rust语言环境是否安装成功:
$ rustc --version
rustc 1.83.0 (90b35a623 2024-11-26)
$ cargo --version
cargo 1.83.0 (5ffbef321 2024-10-29)
编译环境要求使用Rust Nightly版本,执行
rustup default nightly
将自动安装并切换到Nightly版本的Rust语言环境。然后,添加riscv架构支持,执行
rustup target add riscv64gc-unknown-none-elf
验证安装,执行
rustup target list | grep installed
输出中存在riscv64gc-unknown-none-elf (installed),即代表操作成功。
为了支持no_std环境的编译,还需要添加一些东西,执行
rustup component add rust-src
2. 安装riscv 工具链
在Ubuntu上,可以直接使用apt安装riscv工具链:
$ sudo apt install gcc-riscv64-unknown-elf
$ riscv64-unknown-elf-gcc --version
riscv64-unknown-elf-gcc (13.2.0-11ubuntu1+12) 13.2.0
Copyright (C) 2023 Free Software Foundation, Inc.
This is free software; see the source for copying conditions. There is NO
warranty; not even for MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE.
注意,我们要安装的是unknown-elf,而不是linux-gnu,其他发行版安装方法可能不一样,如果您不知道其他发行版该如何使用包管理安装,可以手动编译安装:
$ git clone https://github.com/riscv/riscv-gnu-toolchain
$ cd riscv-gnu-toolchain
$ git submodule update --init --recursive
$ ./configure --prefix=/opt/riscv
$ make -j$(nproc)
注意--prefix参数为工具链安装目录,可以自行替换,github仓库克隆时间和编译时间可能较长,需要等待编译完成后,配置好工具链环境变量。
3. 准备SD卡并写入引导程序
Note:下面步骤中,对SD卡分区或向SD卡写入数据,要注意将/dev/sdX 替换为自己的设备,可以通过fdisk -l命令查看自己的SD卡设备名
首先,准备一个至少32GB的SD卡和一个读卡器,将其插入自己的Linux机器,进行分区和格式化:
$ sudo sgdisk -g --clear --set-alignment=1 \
--new=1:4096:+2M: --change-name=1:'spl' --typecode=1:2e54b353-1271-4842-806f-e436d6af6985 \
--new=2:8192:+16M: --change-name=2:'opensbi-uboot' --typecode=2:5b193300-fc78-40cd-8002-e86c45580b47 \
--new=3:40961:+64M --change-name=3:'efi' --typecode=3:C12A7328-F81F-11D2-BA4B-00A0C93EC93B \
/dev/sdX
$ sudo mkfs.fat -F 32 /dev/sdX3
如果mkfs.fat命令未找到,需要安装dosfstools。接下来,我们开始制作引导程序,并将程序写入SD卡的分区中:
$ git clone https://github.com/QIUZHILEI/vf2_bootloader.git
$ cd vf2_bootloader
$ cargo fetch
$ ./gen_img.sh
执行完上述命令后,会在vf2_bootloader目录下生成一个fw.img的文件,在tools目录下,已经准备好了spl u-boot-spl.bin.normal.out 和一个用于测试的内核 LEGO.OS ,我们继续将 u-boot-spl.bin.normal.out 和 fw.img 分别写入SD卡的第一个和第二个分区,将LEGO.OS拷贝到第三个分区,在vf2_bootloader目录下执行:
$ sudo dd if=./tools/u-boot-spl.bin.normal.out of=/dev/sdX1
$ sudo dd if=./fw.img of=/dev/sdX2
$ sudo mount /dev/sdX3 /mnt
$ sudo cp ./tools/LEGO.OS /mnt/
$ sudo umount /mnt
至此,SD卡制作完成。
Note:注意mount命令挂载的位置,如果/mnt被占用,可以选择其他目录
4. 准备Visionfive2
按下图将Vision five2的Uart串口引脚与USB转TTL线连接:
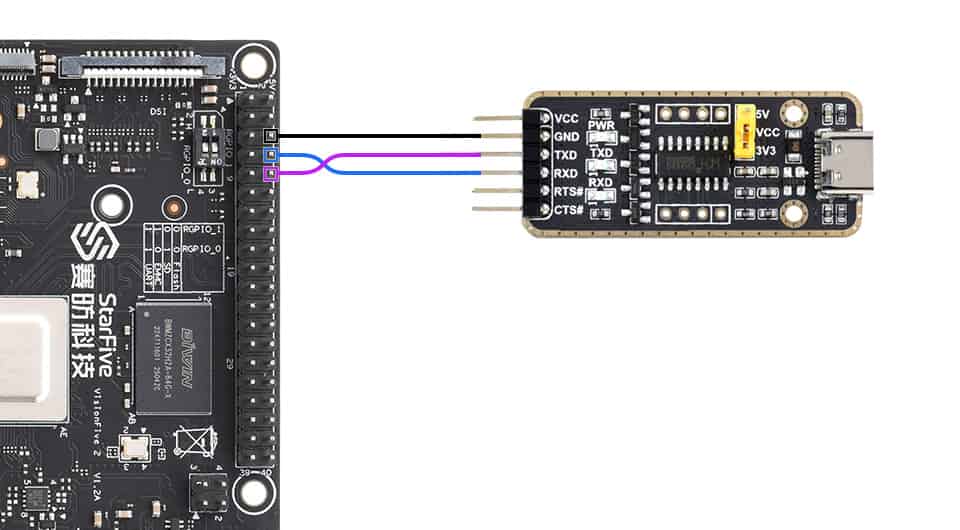
Note:另一端需要使用一个Type-C数据线,将USB转TTL模块连接到自己的机器
本机需要安装一个能够监视Uart串口输入输出的软件,例如MobaXterm、vscode Serial Monitor插件、minicom命令行、picocom命令行,这里我们使用minicom命令行工具(你需要使用包管理或手动编译安装这个工具),串口设备在我的机器上映射名称为ttyACM0,VisionFive2 uart的波特率为115200,执行
sudo minicom -b 115200 -D /dev/ttyACM0
开始监视串口设备。minicom可能存在不自动换行问题,执行完上述命令后,可以通过按Ctrl+A再按Z,找到加入换行(应该是按U)打开即可。
按照前文所述的启动模式,将Visionfive 2板子的启动模式调整为SDIO模式。
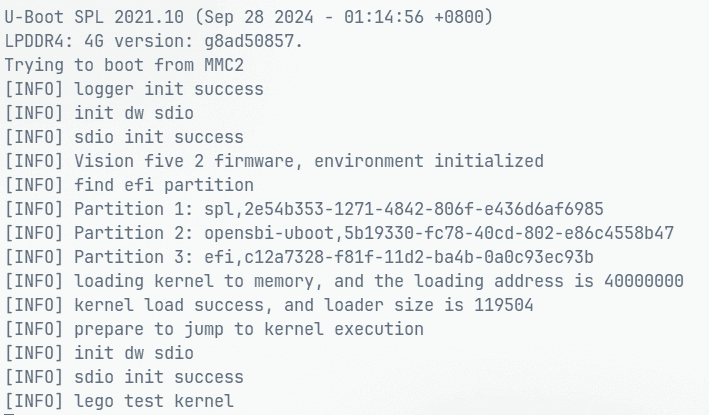
5. 启动Visionfive2
完成上述步骤后,将SD卡插入visionfive2的SD卡插槽,然后接入电源,我们就可以在串口监视器上看到输出:
参考资料
riscv-collab/riscv-gnu-toolchain: GNU toolchain for RISC-V, including GCC